



机器视觉与自动化中心成立
来源:www.mvcreating.com2021年12月29日热度:365
【中心简介】
机器视觉检测与自动化中心响应制造业转型升级对视觉检测与自动化技术的迫切要求而筹建成立,在位置姿态测量,表面尺寸测量,形面质量控制,过程监控与测量等领域可提供技术服务和一整套解决方案。
主要研究方向包括:
1、 视觉计算方法:单相机位置姿态测量,立体视觉,编码结构光,激光三角法,光场三维重建,偏折术、视觉控制等。
2、机器视觉关键技术:成像系统,图像处理,特征检测,特征识别,特征分类,视觉伺服等。
【科研团队】
机器视觉检测与自动化中心由香港科技大学、上海交通大学和上海大学的专家学者共同组建,其中教授2名,副教授1名,视觉工程师8人。
【研究方向】
机器视觉检测与自动化中心发挥自身的技术优势专注于产品研发。目前,正在研发的产品有:
1、便携式大场景光学三坐标
针对车间现场对零部件高精度三维测量的需求,本产品通过高品质的相机成像系统和不同类型无线测头的组合,构成了便携式3D测量解决方案,能够胜任以下任务:1)隐蔽点及隐蔽几何特征的三维测量;2)自由曲面的三维测量;3)空间多点的三维动态跟踪测量。典型应用领域包括:在机床上对大型薄壁件进行三维测量、飞机工装、夹具的检测;大型叶片的叶型测量、大型铸造零件的测量、大型船体模具的测量;机器人重复定位精度的检测、机器人空间运动轨迹的测量。
2、机器人3D视觉引导的散堆件拾取系统
3D视觉引导系统能够感知3D工作场景,定位目标工件,确定机器人操作位置和轨迹,提升机器人的柔性和可靠性,帮助机器人胜任更复杂的工作(自动化组装、材料处理、装配等)。机器人3D视觉引导系统与传统的人工示教和复杂的工件定位装置相比,大大提升了生产效率,降低了成本。该系统能够胜任以下任务:1)拆垛:不局限于单一尺寸产品固定摆放规律的拆垛任务,即使对于不同尺寸无固定规律的产品拆垛亦可自动识别定位;2)箱柜取放,零件散乱堆放的箱柜,实现任意形状工件的三维识别,即使存在遮挡、姿态移动也可高速、高精度的识别;3)上下料,可对任意形状姿态的零件进行排序、安放。
更多信息请见科研成果。
3、工业机器人位姿测量与标定系统
目前,机器人应用于自由曲面加工的需求愈加突出,例如:叶片机器人磨削,船用螺旋桨的机器人铣削。与传统点位加工不同,复杂曲面产品制造具有结构复杂、性能指标精度高、连续轨迹运动等特点,对工业机器人的结构、性能、动作流程和可靠性等都提出了更高的要求。特别是在绝对轨迹精度方面,串联式的工业机器人的结构安装误差和加工刚性都带来了加工过程的轨迹精度下降,因此位姿测量与标定系统对保证制造过程精度具有重要意义。
系统组成:硬件:该系统的主要硬件有:两个工业相机(如图1(a)),主动光立体标靶(如图1(b)),工控机(如图1(c)),标定标靶(相机标定标靶+特征标靶,如图1(d))。软件:标定,测量及机器人控制软件平台(手眼标定,立体标靶标定,系统测量精度评价,测量测试,图像采集及测量,机器人控制)如图2所示。测量深度范围:500mm~3000m,测量视场见表1。该系统能够胜任以下任务:1)机器人位置姿态的实时测量;2)机器人视觉伺服;3)机器人参数标定;4)机器人轨迹姿态性能特性评定。
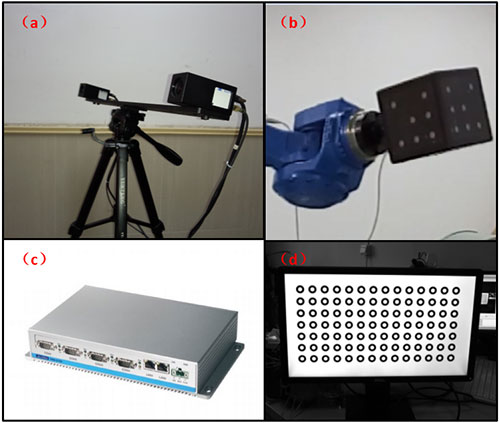
图1 系统硬件组成
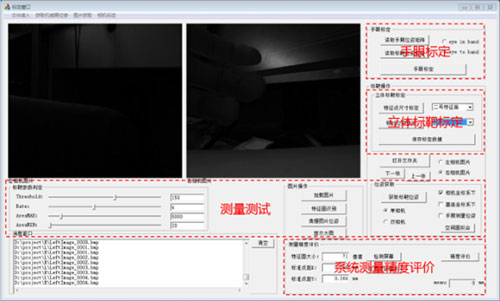
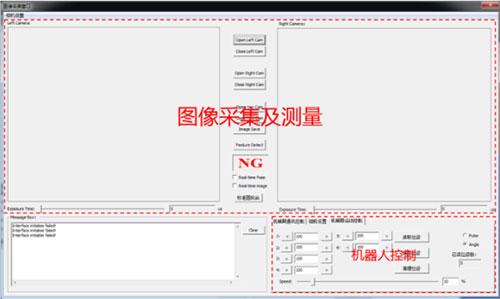
图2 软件平台界面
|
测量距离/m |
视场大小 |
测量距离/m |
视场大小/mm |
|
0.5 |
408*552 |
2.0 |
1631*2206 |
|
1.0 |
816*1103 |
2.5 |
2038*2782 |
|
1.5 |
1223*1656 |
3.0 |
2446*3312 |
表 1 相机视场范围
下一条: 机器视觉技术的十大应用领域
